Automatic guided vehicle systems are one of the core components of the automated logistics system, which acts as a link between the various components of the production line. With the improvement of industrial production automation, the application and development of automatic guided vehicle systems have broad prospects. This paper summarizes the system planning and design according to the requirements of the paper industry for automatic guided vehicle systems functions, optimizes the path planning part according to the actual project requirements, and realizes the function of dynamic obstacle avoidance when the global route has been planned. , To better optimize system efficiency and safety.
The automatic guided vehicle system is the abbreviation of “Automatic Guided Vehicle System”, which has the advantages of high work efficiency, simple structure, strong controllability, and good safety. automatic guided vehicle systems is an integrated intelligent logistics handling equipment that integrates mechanical devices, electronic control equipment, safety anti-collision equipment, data information acquisition sensors, Fieldbus and other technologies. It can be extended to add other functions to the body, such as manipulators, rollers, and electronic scales. Platform etc. Under the host computer scheduling and planning, the automatic guided vehicle systems are ordered to track the path according to its planned path, accurately reach the target platform and perform the requirements of unloading and unloading, and realize the functions of unloading and handling operations. In the automated logistics system, the automatic guided vehicle system can fully reflect its automation and flexibility, and realize efficient, economical, and flexible unmanned operations.
Contents
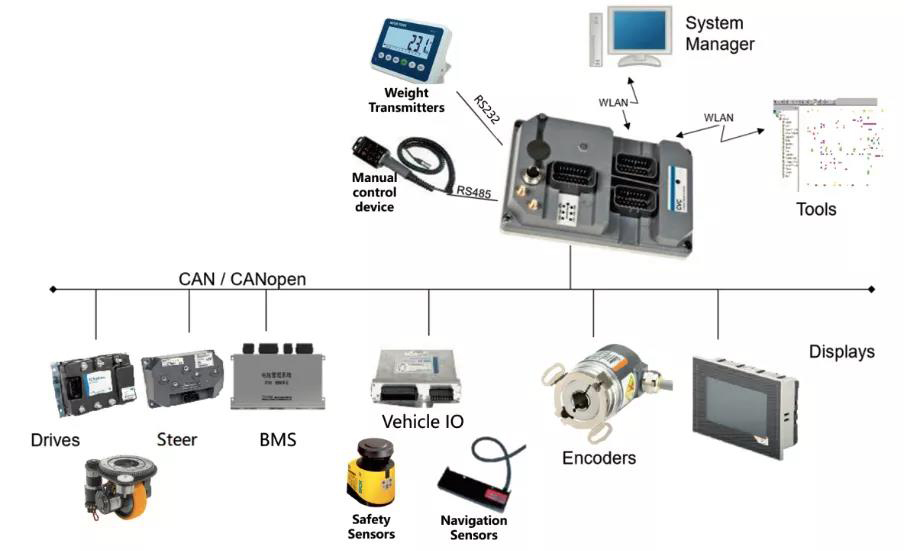
The software and hardware composition of AUtomatic guided vehicle system
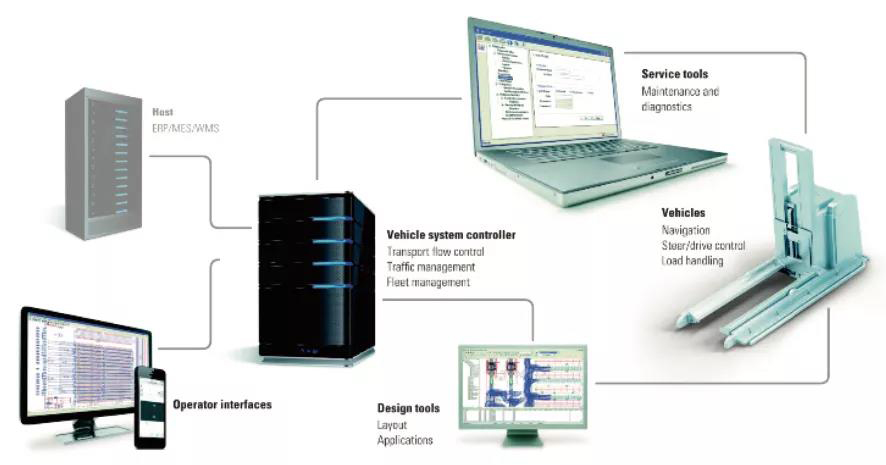
The AGVS software control part is mainly composed of the ERP/MES/WMS host and the AGV system management and monitoring host (Figure 2). The AGV management machine and the monitoring machine are the core of the AGVS operation. The main functions are: execute task commands; for different transportation The optimal AGV trolley for task allocation; arrange transportation routes for each transportation task; control the traffic of multiple AGV trolleys in the AGVS; process some input and output signals on the spot.
Application of AGVS in the paper manufacturing industry
Through the AGV trolley, the base paper is transported from the base paper workshop to the processing workshop, and then the mandrel is returned from the processing workshop to the base paper workshop. The processing workshop contains both paper roll and paper processing equipment. The system is controlled by a certain program to achieve the comprehensive realization of AGV unified scheduling, online metering, data storage, and query functions.
Paper roll transportation
The material conveying system is mainly responsible for conveying the raw paper and the mandrel. The system automatically matches and controls the truss manipulator and AGV to complete the conveying of the raw paper according to the type of the raw paper roll and the application for the subsequent processing machine. The specific process is:
When the raw paper roll is curled, the paper reel uses the sensor to determine whether the paper roll has reached the offline condition. After the offline condition is reached, the car instruction is initiated. The system dispatches the AGV to the designated location to pick up the goods. After the AGV reaches the designated location, the reel automatically terminates In the curling action, the truss manipulator hoists the original paper roll on the AGV and sends the relevant information of the original paper roll to the superior management system. After the entry and hoisting, the AGV records the current paper roll weight, sends it to the AGV management system to save the record, and waits for the next step of the system Scheduling instructions. At the same time, the processing workshop equipment automatically initiates a paper request instruction. After the lifting of the raw paper roll is completed, if a processing machine applies for this type of raw paper roll, the system dispatches and controls the AGV to send the paper roll to the corresponding position of the application machine, and the corresponding truss manipulator removes the raw paper roll For processing, the AGV completes the delivery of the original paper roll. After the lifting of the raw paper roll is completed, if there is no processing machine to apply for this type of raw paper roll, the system will automatically send the raw paper roll to the default position to wait according to the machine equipment information and send an alarm message to the system operator. The operator assigns the destination of the base paper. If there is no suitable base paper roll on the AGV when the processing machine applies for the paper roll, the system will first record the application information, and when the suitable base paper roll is off the assembly line, it will be distributed according to the order of application or other distribution principles, and the base paper roll Delivered to the designated location.
Mandrel conveying
According to the production needs, the base paper production machine sends out the mandrel demand through the superior management system. The AGV trolley automatically drives to the processing workshop machine. The truss manipulator automatically places the mandrel on the AGV trolley, and the AGV trolley is automatically sent to the demand station.
Key issues of system design and technological innovation in project application
Task allocation optimization
In terms of task allocation and scheduling, according to the actual position of each automatic guided vehicle trolley, whether there is a task in execution, the distance and time of the task, etc., tasks are automatically assigned to an automatic guided vehicle trolley. After the automatic guided vehicle completes the previous task, the automatic guided vehicle system will automatically schedule the automatic guided vehicle trolley to perform the nearest task according to the logistics system task instruction, which effectively improves the system efficiency.
Secure information exchange
In order to ensure safe production, the automatic guided vehicle management system will send interactive signals to the superior management system before the automatic guided vehicle picks up, before unloading, picking up, and unloading is completed. After the superior management system confirms, the automatic guided vehicle will enter the picker According to different machines, the current status information is sent to the currently docked production equipment, and the equipment to be docked will assist in completing the unloading and unloading actions according to the received information. After the loading and unloading action is completed, the automatic guided vehicle management system will automatically feedback production-related material information to the superior management system. After the superior system gives the next step, the automatic guided vehicle trolley can continue to run.
Mechanism to cancel tasks
If the upper-level system issues instructions incorrectly or human intervention causes the automatic guided vehicle trolley to receive the wrong task and cannot continue to perform the task, the on-site operator can choose to cancel the task on the automatic guided vehicle touch screen, or the control room personnel can use the scheduling system Task cancellation: After the system receives the cancellation instruction, it records the status information of the operator and the task and dispatches the automatic guided vehicle to the designated location for unloading operations. After the unloading is completed, the task is automatically canceled. If the automatic guided vehicle trolley has not picked up the goods, the task is canceled directly without unloading. After the cancellation is successful, the automatic guided vehicle automatically receives the follow-up task instructions.
Path planning

The automatic guided vehicle global path planning in the current project is based on the shortest travel time from the trolley to the loading and unloading platform to plan the path for the trolley (as shown in Figure 4), and expand to the outer layer with the current position node of the automatic guided vehicle as to the center until it reaches the required reach Calculate the shortest weighted route from the automatic guided vehicle’s current location node to the task station node, and gradually expand the shortest weighted path by continuously selecting the node closest to the starting point until it covers the task station node. Here, the weight represents Travel time, the travel time can be obtained by dividing the distance between nodes planned on the map by the maximum speed of travel between nodes planned on the map. However, the automatic guided vehicle in the paper industry has a narrow operating space and many loading and unloading platforms, which can easily cause multi-vehicle congestion. In order to solve the problem that multiple automatic guided vehicles operate in narrow passages without interference, we have optimized them on the basis of global path planning.

Charging management function
Due to the cumbersome production tasks in the paper industry, several charging stations are set up. During the normal operation of the automatic guided vehicle, the Automatic guided vehicle will monitor the battery voltage and SOC in real-time. When the battery voltage or SOC is lower than the preset in the program When the value is set, the automatic guided vehicle will generate a “low battery alarm” signal, which will send a charging request instruction to the Automatic guided vehicle management system. After the Automatic guided vehicle completes the current task, the Automatic guided vehicle management system will dispatch the Automatic guided vehicle to the nearest charging station for charging. Some status information and fault information during the Automatic guided vehicle charging process will be sent to the Automatic guided vehicle management host and the ground smart charging station in real-time. After the battery is full, the charging will automatically end. The Automatic guided vehicle will continue to accept new tasks or wait for the next task at the standby platform. If a failure occurs, the failure information will be displayed on the user’s graphical operation interface to facilitate maintenance in case of failure.
Summary
Focusing on Automatic guided vehicle projects in the paper industry, through the research and technological innovation of Automatic guided vehicle, according to the actual environment of the project site, a combination of global path planning and local path planning is adopted to effectively reduce the waiting time of Automatic guided vehicle trolley blockage and effectively prevent Automatic guided vehicle from The collision of people, objects, etc. makes the system run more stably, efficiently and safely.
