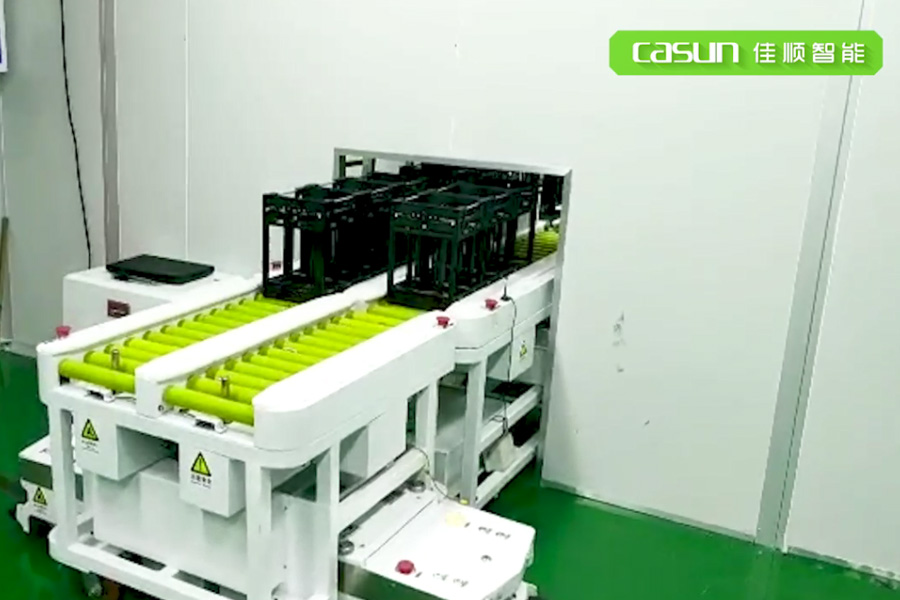
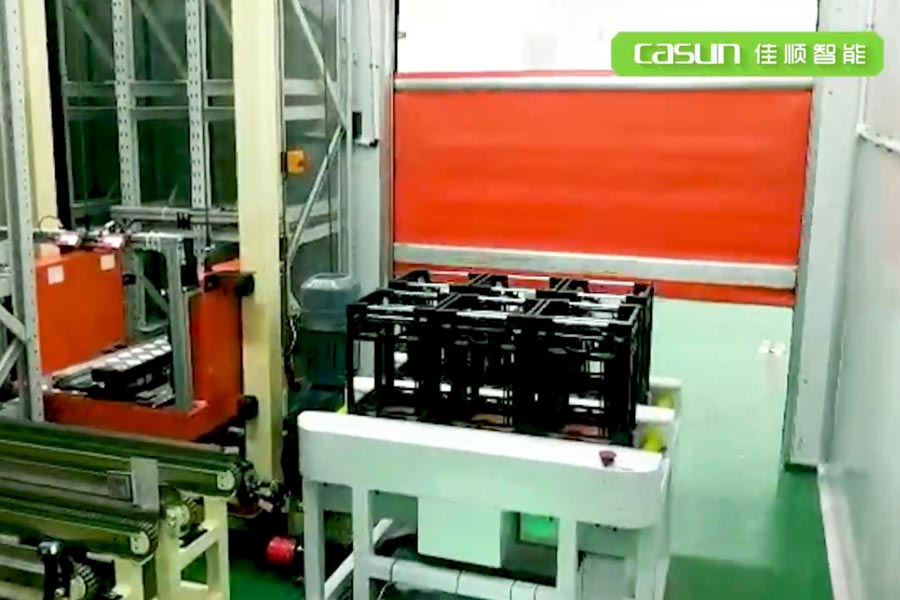
lithium battery PACK manufacturing line intelligent upgrade application sharing
ContentsIntroduction of new energy lithium battery pack lineBattery PACK line process flowDifficulties in PACK Line RequirementsHighly customized needsHigh security and high stability requirementsThe whole line …
Power battery manufacturing factory | AGV/AMR application sharing in the front-end process of power battery manufacturing industry (3)
Under the trend of large-scale development of power batteries, material cost reduction has limited the reduction of BOM cost of power batteries. Through innovative manufacturing …

Power battery manufacturing factory | AGV/AMR application sharing in the front-end process of power battery manufacturing industry (2)
The global power battery is starting a new round of capacity expansion, accelerating the development of power battery manufacturing towards large-scale, automated and intelligent trends. …

Project Sharing – Logistics Planning Concept in the New Era of Car Manufacturing
ContentsApplications of AGV/AMR in the automotive logistics industryStamping WorkshopWelding workshopPaint shopAssembly workshopInnovative applications of AGV/AMR in the automotive logistics industryApplied Technology InnovationApplication Scenario Innovation Applications …

Case Appreciation | CASUN Intelligent and a large tobacco company to create a smart logistics benchmarking project
With the popularization of mechanization and informatization, relying on the development of the Internet of Things, big data and autonomous driving technology, manufacturing companies have …

Automobile Industry (3) | Intelligent Manufacturing Application Practice Sharing in Automobile Welding Workshop, Helping Intelligent Manufacturing Upgrade of Automobile Industry
The design of a modern automobile factory is a complex system engineering. As a typical welding factory among the four major processes of the whole …