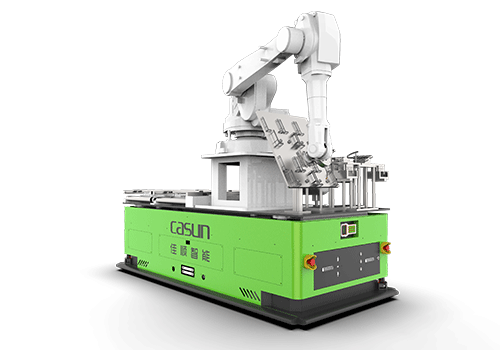
CASUN Autonomous Mobile Robot with Robot arm– C6-21 CASUN Autonomous Mobile Robot with Robot arm– C6-21 QR code Guided Navigation Method 800KG AGV Payload 10kg (custom support) Robot arm paypload AGV ModelC6-21 SizeL2316*W1120*H1027mm Moving methodForward, retreat, rotate in place, move sideways Moving speed0~60m/min Navigation accuracy±10mm Stop accuracy±10mm Driving methodDifferential drive Applications Product application cases